

新闻资讯
文章推荐
产品展示

安博电竞BX2-800 高速并联工业机器人
2016 美国机器人技术路线图解读系列之五 ——空间机器人
发布时间:2023-12-22 16:42:03 来源:安博电竞
2016年11月,以加州大学圣迭戈分校、卡耐基梅隆大学、克莱姆森大学为首的美国19所大学在美国科学基金会的支持下,联合发布了《美国机器人技术路线图:从互联网到机器人》(后文简称《路线图》),总结机器人技术目前的发展机会、面临的挑战及解决方案。本期,我们将结合《路线图》以及美国国家航空航天局(NASA)制定的《机器人、遥机器人和自主系统发展路线图》,介绍和解读机器人在空间探索领域的发展概况。
人类从未停止过认识外太空的脚步,借助人造卫星、空间飞行器、空间机器人等设备,不断将自己的智慧和触角延伸到近地空间、星际空间以及行星表面。
作为探索外太空和维护在轨资源的重要手段,空间机器人能替代人类执行行星表面巡视、土壤采样、小行星捕获等星际探索任务,以及航天器故障检验测试、燃料加注、目标抓捕等在轨维护任务,从整体上降低航天任务的成本与风险,拓展人类认知与改造外太空环境的可能。
按照功能划分,空间机器人最重要的包含用于近地空间在轨维护的自由飞行机器人,用于空间站辅助航天员工作的空间站机械臂或机器人宇航员,以及用于行星表面探测的飞行机器人或巡视器。
自由飞行机器人通过主动机动变轨或在轨等待,接近、伴飞、停靠、对接甚至捕获目标飞行器,利用飞行器平台上的传感器或机械臂,对目标飞行器进行观测、抓捕、维修等工作,最终完成在轨维护任务。涉及的关键技术包括:非合作目标的跟踪接近、非规则形状运动目标的抓捕、非结构化环境下的遥操作等。


空间站大臂主要由空间站内的宇航员或地面操作人员控制,可以将宇航员或货物运送到指定区域,提高宇航员的舱外活动效率;也可以抓捕合作目标,辅助空间站与货运飞船的对接,及空间站自身的组装和扩展。涉及的关键技术包括:大柔性臂的变拓扑动力学建模、带有多个大柔性部件的空间站振动抑制等。
灵巧手一般自主执行任务指令或由空间站内的宇航员控制,大多数都用在部件装配、模块更换等精细操作任务。涉及的关键技术包括:高冗余机器人的运动规划与避障、多点接触操作的传感与控制等。
机器人宇航员是指用于空间站,并与宇航员协同工作的人形机器人。目前,仅有NASA研制出了原型系统。机器人宇航员有着非常丰富的传感感知能力,以及类人的高冗余运动自由度,Valkyrie还具备类人行走能力。机器人宇航员能够自主感知空间站的内外环境,并按照高级指令进行任务和运动的自主规划和控制,在同一环境中与人类宇航员合作。涉及的关键技术包括:微重力环境下的稳定类人行走、人机共融与协作、基于丰富传感信息融合的自主规划与决策等。

根据NASA提出的“小行星倡议(Asteroid Initiative)”,未来美国将研制若干探测飞行机器人,以逼近、悬停、着陆或包裹等方式探测、俘获近地小行星。探测飞行机器人不仅仅具备与自由飞行机器人相似的能力,可以主动逼近非合作目标——近地小行星,还可以着陆在小行星表明上进行接触式勘测,并将宇航员运送至小行星上开展工作。涉及的关键技术包括:非规则引力场中的机器人位姿控制与软着陆、接触式采样机构设计与机器人动力学控制等。

行星表面巡视器以轮式车辆为主体,搭载相机、分析仪器、通信天线、太阳能电池板等载荷,以及用于土壤、岩石采样的机械臂。巡视器一定要通过视觉观测重建行星的地形地貌,并根据重建信息进行路径规划,自主运动到目的地。涉及的关键技术包括:非结构化环境的三维场景快速重建、自主路径规划与避障、复杂地形地貌下轮式运动的鲁棒控制等。

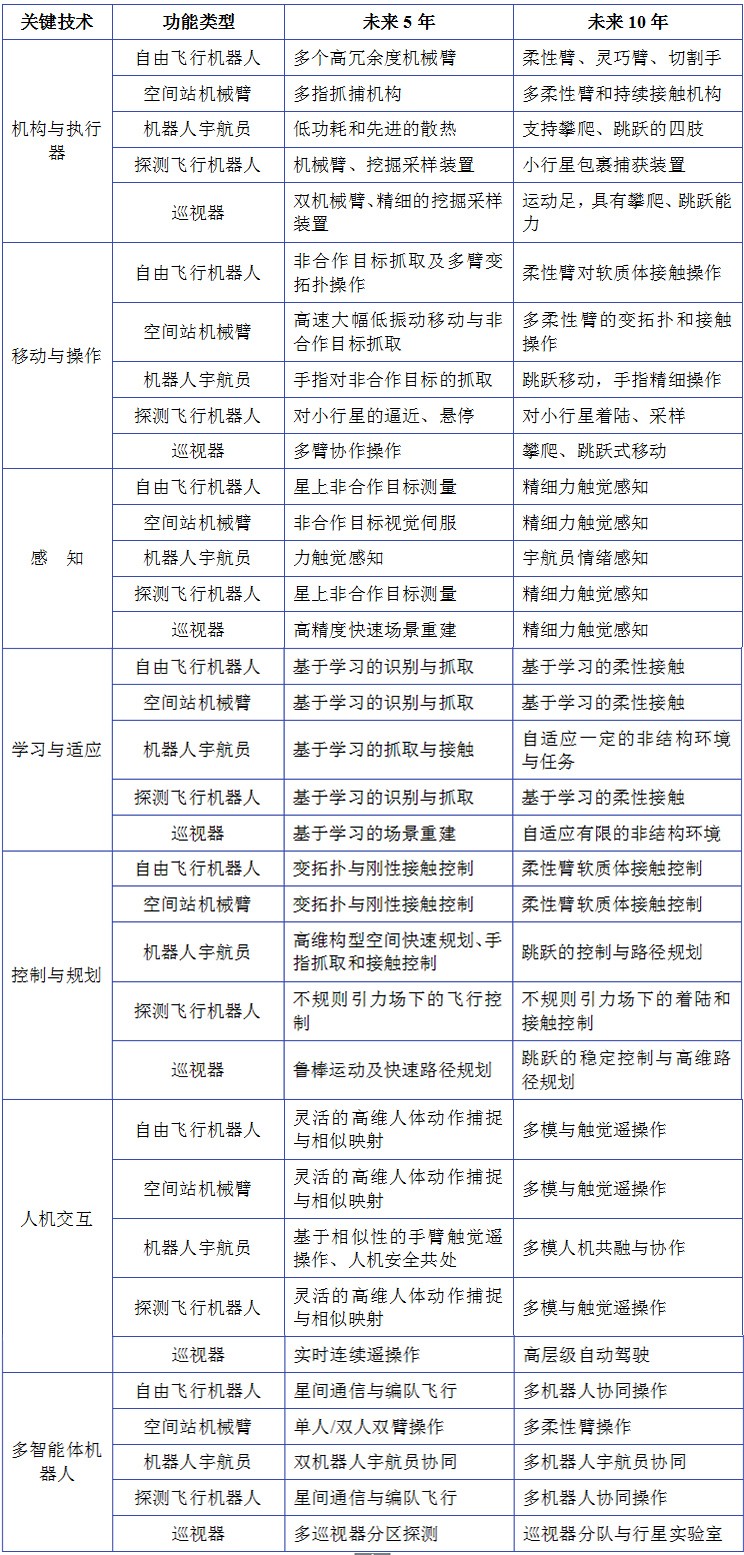
《路线图》重点论述了机构与执行器、移动与操作、感知、学习与适应、控制与规划、人机交互、多智能体机器人七项关键技术的发展路径,详见表1。
我国对空间机器人进行有组织的系统研究始于1990年代初期,在“国家高技术探讨研究发展计划”和“载人航天工程”的支持下,取得了一系列技术突破,研制了有关技术演示系统。
在自由飞行机器人方面:我国于2013年7月发射了开展空间碎片观测和空间机械臂操作的空间机器人。在自由飞行机器人领域已取得空间机械臂设计、研制与控制,全系统地面仿真验证,机器人任务路径规划等一系列技术突破,初步形成了实际应用能力,但与国外领先水平还存在比较大差距。
在空间站机械臂方面:我国已完成臂展达15m量级的大臂初样研制和地面气浮台实验,预计在2020年前后发射并在空间站上组装。
在探测飞行器方面:嫦娥二号于2012年12月飞越图塔蒂斯小行星并传回清晰的光学图像,这是我国首次利用飞行器近距离探测小行星,也丰富了人类对地外空间小天体的认识。
在巡视器方面:玉兔号月球车(嫦娥三号)于2013年12月着陆月球,在月球表面开展了总计972天的工作。虽然出现了唤醒失败的插曲,但仍是我国开展行星表面探测巡视的标志性尝试。
在机器人宇航员方面:我国在该领域的研究尚属空白,甚至缺乏相关的理论研究基础。国外,仅有美国研制出了机器人宇航员,日本在人形机器人领域也有很强的科研实力。
第一,自上向下,统筹管理。要把空间机器人的研制放在国家重大装备与工程的战略地位上进行长远规划,瞄准各项空间任务的实际迫切需求来做论证设计,避免重复建设及后继乏力。
第二,补足短板,填补空白。我国空间机器人技术与国外领先水平还存在很大差距,一些关键组、部件的性能指标有待提升,一些关键科学问题与模型、算法尚需攻关,某些重要领域如机器人宇航员的研究还处于真空状态。
第三,军民融合,亦军亦民。由于我国航天格局的特殊性,军方在空间机器人研制中处于牵引地位。一方面,应围绕需求合理匹配地方科研资源,另一方面,应疏通空间机器人研制过程中相关技术的民用化、通用化,使航天技术能更好地转化为生产成果,形成实际效益。
- 上一篇:动图剖析:工业机器人运动方法解读
- 下一篇:工业机器人系统的六个子系统是指哪些?

